Experimentation
The linear programming technique used in Cplex gives an off-line solution for the static stage. Figure 7 presents a GANTT diagram for scenario #0.
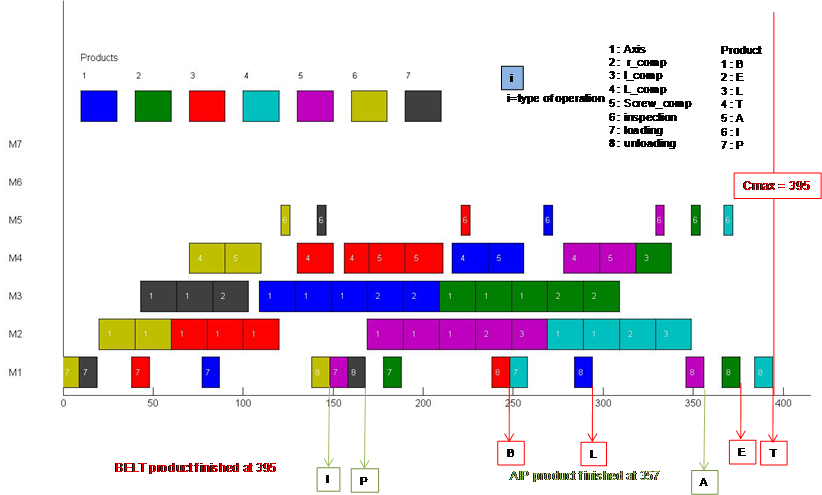
The allocation of operations is well-balanced on different machines, with a little overloading of the machine M3. This overload is due to the decision of allocating the jobs B, E and P that require many operations of type 1 (Axis) and type 2 (r_comp). Successive Axis and r_comp operations are performed in the same machine when possible. Choosing machine M3 instead of M2 in some cases can be explained by the fact that the machine M2 is not able to perform the L_comp operations, so it is discharged. The makespan obtained with Cplex is the optimal one. It will be used for the robustness evaluation of both simulations and experiments proposed in the rest of this paper.
As previously written in the preparation step, the dynamic stage is not dealt with the MILP program presented above.The resolution time of the MILP for this simple case is long (i.e., more than one hour). If a perturbation occurs the model has to be re-parameterized and solved again by the MILP. Thus, in a dynamic context, this kind of approach cannot be considered without releasing some constraints, which must be carefully studied otherwise.In a dynamic context, this clearly militates to design for example effective meta-heuristics approaches or more reactive control systems, which is currently under development in our team.